
RoboCup仿真3D中文教程-前言
Published:
这是关于RoboCup仿真3D中文教程的介绍。
RoboCup仿真3D中文教程

RoboCup仿真3D中文教程(RoboCup Simulation 3D Chinese Tutorial,RCS3D-CT)是介绍RoboCup机器人世界杯中仿真3D比赛的中文教程,主要对比赛的历程和主要内容进行介绍,帮助新参与比赛的队伍了解比赛,并快速上手底层,进行开发。
说明📑
[!CAUTION]
应老师需求,仿真3D比赛需要一本介绍比赛和底层的中文教材。自去年10月准备编写RoboCup仿真3D教材,但意志不坚定,工作量较大,技术更新较快,个人难以完成,遂产生此不完整的材料😔,后面可能也不会再次添加。但写了不能浪费,可以用作后续参考。本README将简要介绍已完成教程的部分,以及未完成部分所预期内容。接着,介绍历届RoboCup比赛情况和可作参考的资料。最后,会写一些个人觉得有用的内容:D。
文档介绍✒
在写作时,首先在markdown上进行写作,之后复制到word中,每完成一章复制到word中。目前已完成前四章的内容,因此有四个md文件,对应四个章节,最后把目前word中的内容转为了PDF。
第一章 机器人与机器人足球:本章在设计时是为传统教材的前言部分,主要介绍机器人的起源和发展,其中特别介绍了RoboCup机器人世界杯这一赛事,以及各组别的简要情况。
第二章 仿真足球系统:本章以仿真足球系统为切入点,介绍了进行机器人仿真的流程和基本原理。比较了主流仿真系统之间的差异,并重点介绍了RoboCup仿真3D比赛所采用的仿真引擎–SimSpark以及使用该引擎开发的比赛环境–RCSSServer3D。其中重点介绍了RCSSServer3D仿真环境的安装和使用,并介绍了比赛环境中较为重要的概念(如感知器及其相关语法格式等)。最后,为新加入比赛的团队,推荐了目前开源的底层代码,来帮助他们了解并快速上手比赛。
第三章 系统结构与模块:以UT Austin Villa 3D团队开源的底层代码为例,介绍主要的结构和仿真比赛运行流程。介绍了底层代码主要的功能模块,其中包含了进行仿真3D比赛所需要实现的完整功能,帮助读者理解仿真比赛的运行流程。
第四章 机器人模型:介绍了仿真机器人的主要参数信息和不同异构机器人的区别,并利用机器人状态空间,所能够实现的功能。
下面是未完成部分:
第五章 机器人世界模型:机器人世界模型(WorldModel)是机器人感知世界的中间方式,通过构建机器人世界模型,能够实现从传感器到具体信息的转变。本章可以介绍构建世界模型的方式和主要内容、如何定位自身、如何确定自身状态等,从而为后续高级行为提供数据支撑。
第六章 机器人动作设计及优化:机器人的各关节变化组成一个机器人动作,机器人动作是比赛中的重要的评估标准。从头部旋转定位球、到设计关键帧实现简单踢球、再到扑球等都较为复杂。如何在仿真比赛中设计一个动作、利用的工具,以及如何对其进行优化。或者不通过具体设计利用深度强化学习,让机器人自行探索实现令人惊艳的效果。
第七章 机器人高级行为与团队决策:各机器人信息不直接共享,如何实现团队间的合作。利用世界模型提供的信息,构建高级团队决策,实现11名球员的角色分配、传球点或者其他方式。
附录 实验:为帮助新团队实现快速上手,设计合适的实验,在实践中了解仿真3D。
比赛运行结构💻
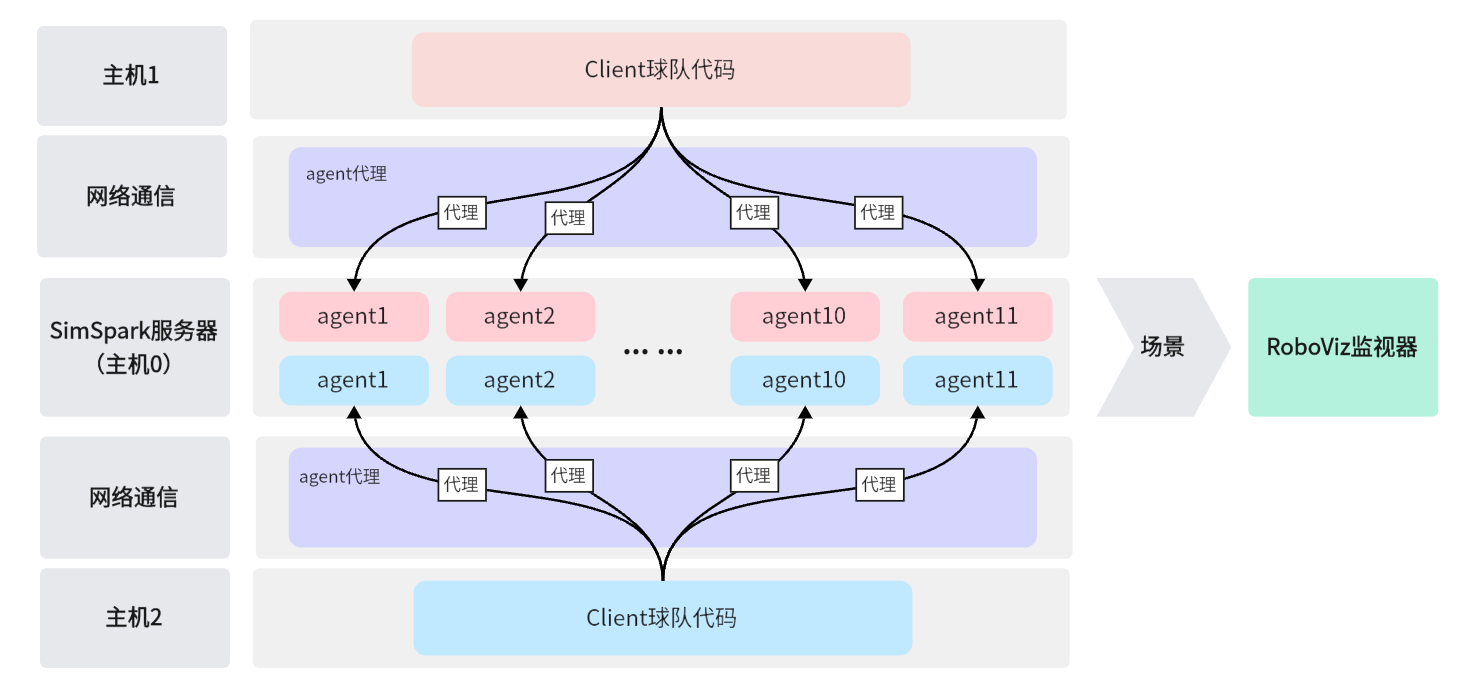
在正式比赛中,服务器将运行在单独的一台主机上,以此来保证仿真的实时性。双方球队的代码将运行在另两台或另一台主机上,通过局域网与服务器建立连接,实现Server与Client的循环通信。为避免各个agent的计算和网路延迟不同而导致仿真不一致的问题,在比赛时往往需要使用智能体代理(见下方Client Agent Proxy repository),将同一球队的不同agent的消息对齐后,一同发送到服务器上。与此同时,为直观地观察仿真状态,服务器会自动转发场景信息,可通过监视器(见下方RoboViz repository)观察球场环境,并执行开球等裁判命令。
历届比赛情况🏆
RoboCup机器人世界杯至今已举办多年,大约每年7月份举办,举办地点每年不同。仿真3D比赛作为最古老的赛事之一,自2004年来目前共举办了21届,其中最多时来自全世界各地区的三十多支队伍同台竞技。近些年,不少队伍退出了比赛,而且由于参赛壁垒较高,很多新队伍想参加但也望而却步。(这也是本教程最初出现的原因,希望能够降低比赛入门难度)。
RoboCup仿真3D比赛中获得世界冠军最多的队伍是UT Austin Villa 3D(C++语言),其在2011至2021的10年之间获得了9次世界冠军,一次世界亚军,并在2016年开源了其底层代码。在此之后,国内很多队伍都基于其底层进行开发,国赛(即RoboCup机器人世界杯中国赛)上持续了几年参赛队伍均为UT底层的情况。
在2021年和2023年,MagmaOffenburg(Java语言,Python版本构建中)和FC Portugal(Python语言)团队分别开源了其底层代码,为仿真3D比赛注入了活力,他们也分别是近三年世界杯比赛的冠亚军。近两年,国赛上百花齐放,不少新队伍也加入了仿真3D大家庭,极大地促进了比赛的进步和技术的迭代。目前国赛上,三种开源底层均有出现,也有不少优秀的队伍开源了相关成果,为新队伍提供了良好的示范。
可做参考的资料📚
以下整理了一些可做参考的资料,供读者自行查阅。
官方资料
RoboCup仿真3D官网为新参与的队伍提供了相关教程,包括比赛环境的安装、往年比赛日志、交流群等,相关介绍如下:
- RoboCup 3D Tutorials for Newcomers:提供了相关视频教程,教学仿真环境的安装、magmaOffenburg团队底层介绍和UT Austin Villa 3D团队底层介绍。
- RoboCup 3D Organizing Committee guide:提供了组织一场完整仿真3D比赛的教学,包括电脑参数、文件系统、代理配置等。
- RoboCup Competitions archive:记录了仿真3D历年比赛的团队描述文档、二进制文件、比赛回放等。
- SimSpark and RCSS Server 3D repository:仿真3D比赛环境的官方存储库,每次server版本更新会在此更新。
- Client Agent Proxy repository:为解决智能体不同步而设计的代理的存储库。
- RoboViz repository:RoboViz比赛监视器的存储库。
- Community communication: Discord server比赛交流社区。
- 3D Agent Source-Code Releases:开源底层代码存储库。
- 3D Gazebo Plug-In repository:Gazebo挑战,现已取消。
- Soccer Simulator 3D/Simspark wiki:仿真3Dwiki百科。
论文资料
每年RoboCup比赛除比赛外,会开展RoboCup国际会议,探讨相关学术研究,邀请各赛道冠军撰写冠军论文(Champion Papers)并出版。
UT Austin Villa 3D团队:UT Austin Villa 3D Simulation Publications
magmaOffenburg团队:出版物 — Publikationen
FC Portugal团队:暂无官方合集
国内教学视频
UT Austin Villa 3D:
magmaOffenburg:
FC Portugal:
- 暂无
GitHub开源
最后🙏
编者能力有限,还请包涵!感谢国内外参与RoboCup3D比赛的全体成员!